

How To Set Up Walabot
Introduction
See through walls, track objects, monitor breathing patterns, and more using the power of radio frequency with the Walabot!
Walabot Starter
SEN-14534
The Walabot Starter is a small, programmable sensor tool that looks into objects using radio frequency technology sense the e…

Walabot Developer
SEN-14535
The Walabot Programmer is a programmable 3D sensor within a protective enclosure that looks into objects using radio frequency…
Retired
In this tutorial, we volition explore Walabot's features using the Software Demo Kit (SDK) on Windows and the Application Programming Interface (API) on Linux-based Bone for embedded projects.
Required Materials
To follow along with this tutorial, you volition need the following materials to get started. You lot may not need everything though depending on what you take. Add together information technology to your cart, read through the guide, and adjust the cart as necessary:
* Walabot (Starter or Developer) * Computer (Windows, Linux) westward/ USB Port * micro-B to blazon A USB cable
For more than embedded applications with a Raspberry Pi, yous will need the following materials:
- Raspberry Pi iii Starter Kit
- LCD 7" or Monitor w/ HDMI Cable
- Keyboard and Mouse
Suggested Reading
If you aren't familiar with the following concepts when using a Raspberry Pi, we recommend checking out these tutorials before continuing.
Series Terminal Basics
This tutorial will prove you how to communicate with your serial devices using a variety of last emulator applications.
Hardware Overview
Features
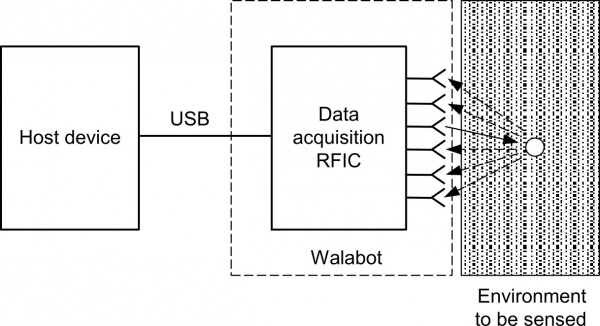
The Walabot utilizes radio frequency technology to sense the surroundings. An image of the environment is reconstructed using an assortment of linearly polarized broadband antennas to transmit, receive, and record signals. The data is processed and sent through a USB cable to a host device. The host device can exist your estimator, single lath computer, or even a smartphone!
Depending on the Walabot model, here are a few possible applications:
- In-Room Imaging
- Object Detection, Location, and Tracking
- Motion Sensing (i.e. Breathing Patterns, Gestures)
- Speed Measurement
- In-Wall Imaging
- Dialectric Properties of Materials
Starter vs Developer
There are three models of the Walabot. For the scope of the tutorial, nosotros volition be using the starter and developer to begin. The starter uses 3x antennas as opposed to 18x antennas to detect the surround. The starter is capable of basic range measurements and monitoring breathing patterns. Due to the amount of antennas it has available, it will not be able to sense objects behind a material. The starter also does not come with an enclosure.
The developer has a higher resolution with the 18x antennas. It's capable of the applications listed earlier. Still, the programmer tin consume more power depending on the configuration and information technology requires a little bit more time to process the data. Beneath is a comparison taken from the datasheet.
| Capability \ Model | Walabot Starter | Walabot Developer |
|---|---|---|
| Physical Specifications | ||
| Number of Antennas | three | 18 |
| Board Size | 72 mm * 48 mm | 72 mm * 140 mm |
| External Powering Pick | ✓ | |
| Enclosure | ✓ | |
| Software API Capabilities | ||
| Bones API functions | ✓ | ✓ |
| 2nd Acquisition | ✓ | ✓ |
| 3D Acquisition | ✓ | |
| Multiport Recorder (Raw Data) | ✓ | |
| Software Application Capabilities | ||
| Breathing Detection | ✓ | ✓ |
| Object Detection | ✓ | ✓ |
| Curt Range Imaging | ✓ | |
Enclosure
The Walabot Starter does not come up in an enclosure. To protect the bare board, you could:
- Cutting Out a Paper-thin Housing
- Laser Cutting Acrylic
- 3D Print a Case
Just make certain to adapt the size of the enclosure for the Walabot Starter.
Walabot w/ Other Wireless Devices
As stated in the datasheet on page 8, the Walabot operates over a range of frequencies. Make certain to configure your device so that information technology does not interfere with other wireless devices used in projects. The operating frequency of the Walabot is higher up the following range so there should not be any inteference:
- Bluetooth
- Zigbee
- Cellular
Antennas
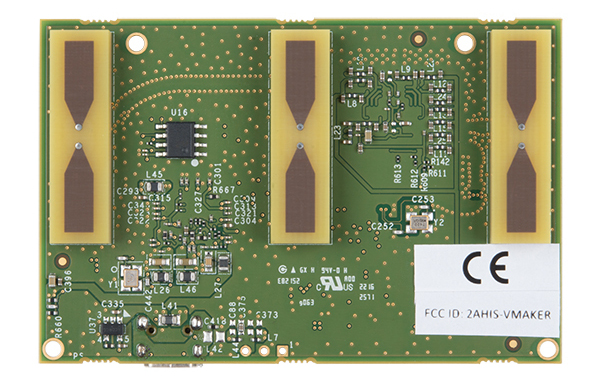
The side with the antennas should exist facing out to sense the environment. The image below shows the Walabot Starter's 3x antennas.
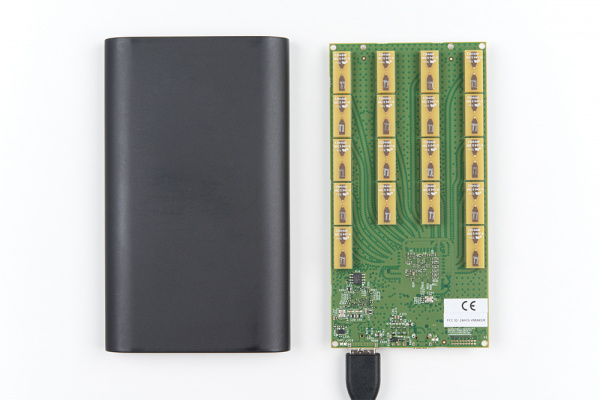
The epitome below shows the Walabot Developer's 18x antennas populated on the board. Make sure the flat side of the enclosure is facing out to sense the environment.
Power Consumption
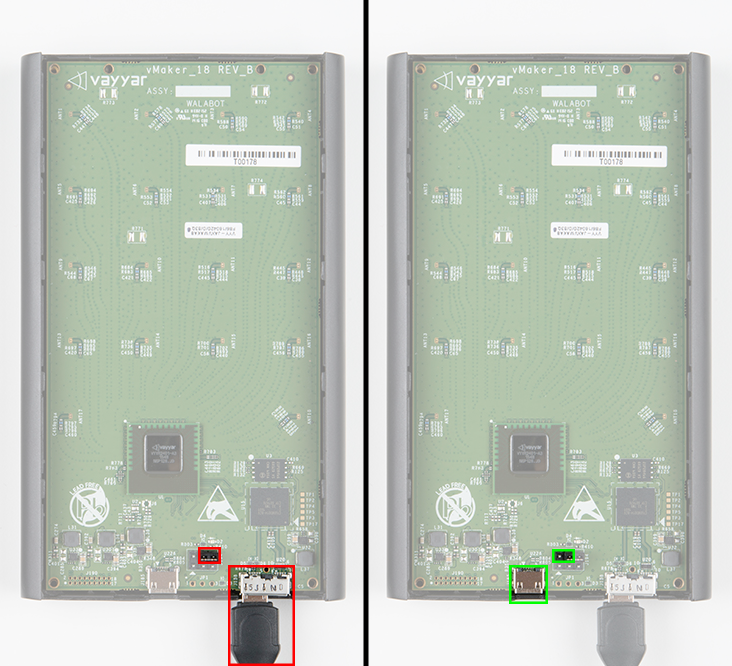
The Walabot requires a 5V (+/-x%) power supply. The lath tin can be powered using a USB port. Depending on the awarding and operation profile, the Walabot may consume up to 0.4A to 0.9A. You may need an additional power source for the Walabot Developer. If necessary, open the Walabot enclosure with a Phillips precision spiral commuter.

Highlighted in red is the default jumper position for data transfer and powering the Walabot. To power the lath with an external power supply, move the jumper to the left side and connect an additional ability source to the USB port highlighted in dark-green. The USB connector is merely for power and so y'all would nonetheless need a USB cablevision continued on the right connector.
Hardware Associates
Walabot Starter
To connect the Walabot Starter, you will demand to align the "D" shape of the micro-B USB cable with the port.
Once the cablevision is connected to the Walabot, connect the other cease to a calculator's USB port.
Walabot Developer
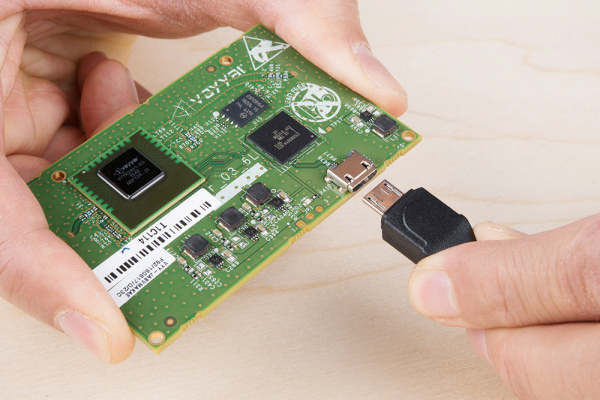
To connect the Walabot Developer, insert the USB cable's micro-B finish to the Walabot'due south USB port. Y'all tin use a separate micro-B USB two.0 cable or the included micro-B USB 3.0 cable. By default, at that place is a jumper that uses the port closest to the border of the Walabot.
If you lot decide to use a separate micro-B USB 2.0 cable to your computer, y'all will be aligning it with the "D" shape of the micro-B USB 3.0 connector as shown in the prototype below.

Once the cable is continued to the Walabot, connect the other end to a computer'due south USB port.
Mounting
You may want to mount the board during testing. Grab some electrical record or mountain the Walabot Starter to a box using standoffs. The Walabot Programmer includes a magnetic disk that is able to stick to a surface such as a robot, smartphone, or wall. With the magnetic mount, information technology is able to attach and detach hands from the surface. In the examples provided, the starter and developer were mounted on a red box or resting on a tabular array for testing.
Software Installation (Windows)
To get started with the Walabot, the easiest would exist to utilize the Walabot demo on Windows to visualize the sensor data. Information technology's a prissy GUI that is able to display the sensor data. Caput over to the download department for the Walabot Software Development Kit (SDK) to begin.
Click on the button for the Windows Installer to download the latest, stable version of the demo software. After downloading, open the executable to install the software.
Example SDK
Once y'all install the Walabot SDK, at that place should exist a shortcut on the desktop. Click on the "WalabotSDK.WalabotAPItutorial.exe" icon on your desktop to open up the program. If you have not already, plug the device to your figurer'due south COM port.
Sensor - Target Detection
The first demo application looks for objects in front of the Walabot. Before we start, make sure that there are no moving objects in front of the sensor. The sensor was mounted to a box in the post-obit instance.

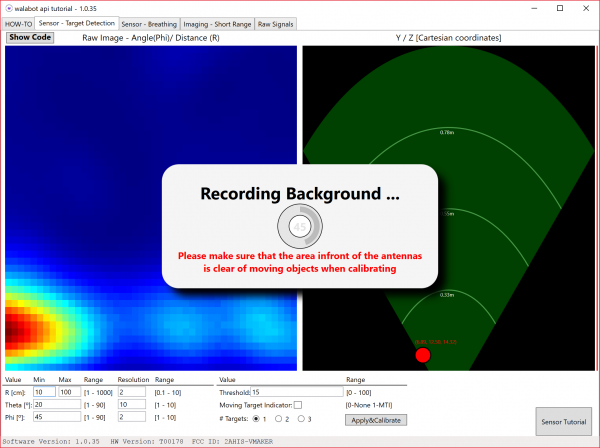
Walabot Starter or Developer Calibration
Click on the tab labeled "Sensor - Target Detection" in the SDK. The Walabot volition begin calibrating. The range seemed a bit small so the loonshit size for R [cm] was increased to 200cm. Once adapted, click on the Apply&Calibrate button to recalibrate.
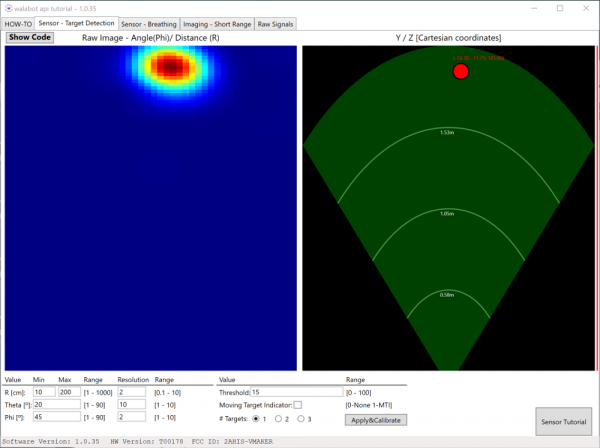
Once calibrated, endeavour moving an object in front end of the sensor. For this example, try testing the Walabot past standing at a distance abroad from the sensor. For simplicity, stand directly in front of the Walabot until the sensor detects you.

Here's how information technology may await when an object is at a distance in the SDK.
Then try moving closer to the Walabot.

Hither'south how information technology may wait when an object is closer in the SDK.
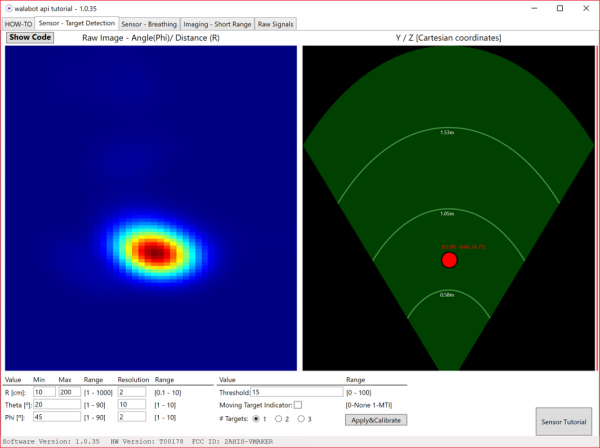
By comparison, you volition notice that the SDK will update in existent time with any object in range. Endeavour adjusting the range to see how far the sensor can detect targets! You can also suit the amount of targets to view!
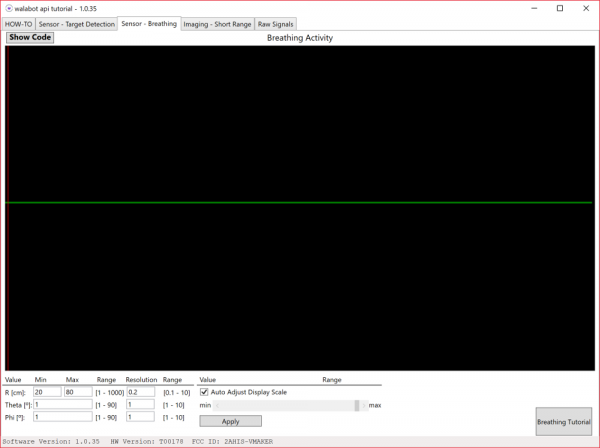
Sensor - Breathing
The 2nd demo application monitors breathing patterns and graphs the readings. Yous need to be at a certain distance away from the sensor to read. The default is between 20cm to 80cm. Click on the tab labeled "Sensor - Breathing" in the SDK.
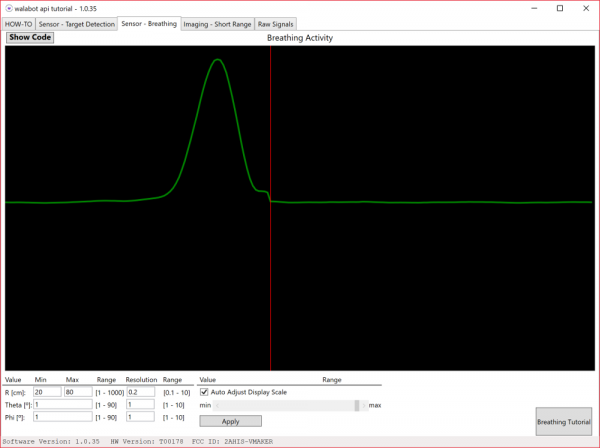
Stand in front of the sensor and inhale some air.

The graph will update in real time as y'all inhale. As you breathe, the graph should rise. Here's how it may look when you accept a deep breath in the SDK.
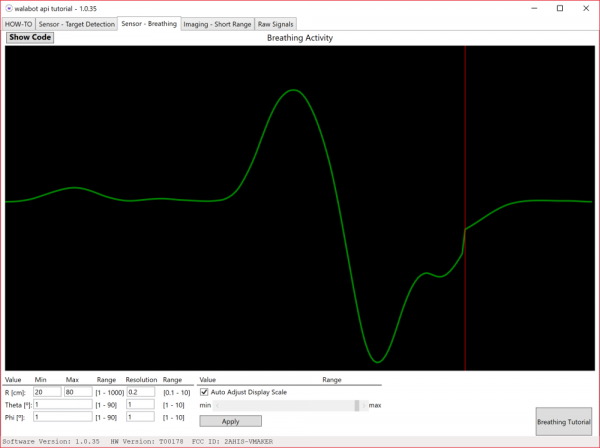
While still standing in front, exhale the air that y'all gathered in your lungs.

Every bit yous exhale, the graph will dip. Here's how it may wait when you lot breathe in the SDK.
Effort adjusting the range to see how far the Walabot tin sense your animate!
Imaging - Short Range
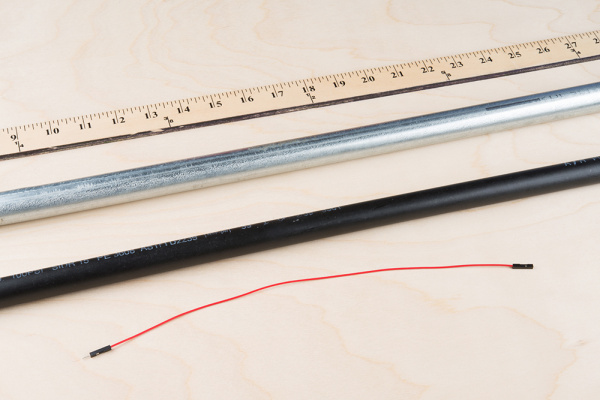
The third demo lets yous view objects behind a wall. Since we are dealing with RF signals, brand certain that the wall is not fabricated of metal. For a quick test, let's endeavour viewing a cloth behind a flat table. Grab a wooden yard stick, metal pipe, a PVC, or a piece of wire to test.
The sensor volition need to view the material that it is looking through. Place the Walabot on a flat table.

Click on the tab labeled "Imaging - Brusque Range".
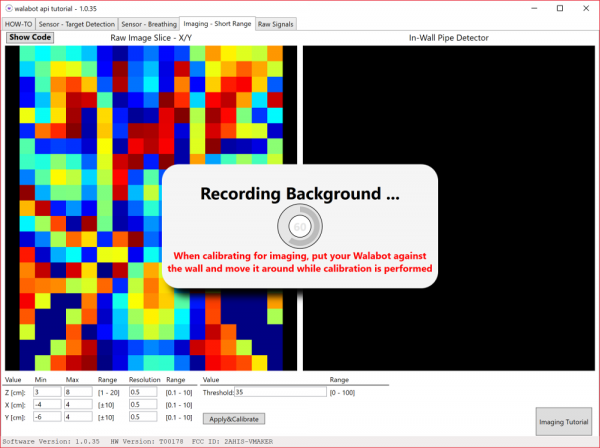
The sensor will begin calibrating. It is recommended to move the Walabot slowly in a circular motion for this scale.
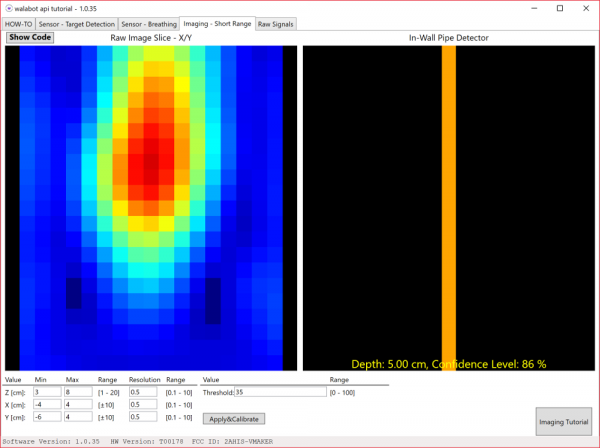
One time calibrated, try placing the material behind the table.

Movement the Walabot over the material.

The In-Wall Piping Detector should display a graphic and indicate the orientation of the pipage backside the tabular array. The textile thickness of the wall (in this case it is a table) and probability that there is an object there is displayed as the Depth and Confidence Level.
Rotate the Walabot.

The In-Wall Piping Detector will respond by showing the material rotated.
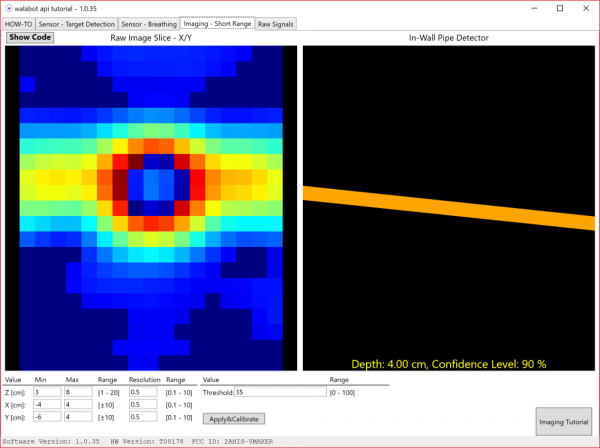
Now try testing it with a wall to see if you can detect a stud or a bundle of wires leading to a wall outlet! The Walabot Programmer can see upwardly to about ~4 inches (~10cm) behind a textile!
Raw Signals
The 4th demo controls the antenna arrays. It is useful for visualizing a waveform for specific applications. Click on the tab labeled "Raw Signals".
Using the default antenna pairs in open up air, the signals volition expect similar the graph on the correct.
Allow'due south try a little paper, stone, scissors to meet how well the Walabot can recognize pocket-sized changes in gestures. Past placing your hand straight over the Walabot in the shape of a stone, the signal should await like the graph on the right.
Opening your had in the shape of a paper, yous will find a significant change in the graph.
Changing the shape of your paw to scissors, you should observe small changes in amplitude throughout the point.
Try experimenting with dissimilar antenna pairs to see what works best when writing code for your custom awarding!
Walabot's Demo Video
Here's an caption using the Walabot with the SDK for Windows.
Walabot API Library
The pseudocode for each example used in the Walabot SDK can exist viewed past pressing the Show Lawmaking button. In that location is also a tutorial push that offers an explanation about the graphs relative to the Walabot. Head over to the Walabot API library for more than information on the functions, parameters, and fault codes when developing applications for Windows.
Software Installation (Linux)
Walabot API Library
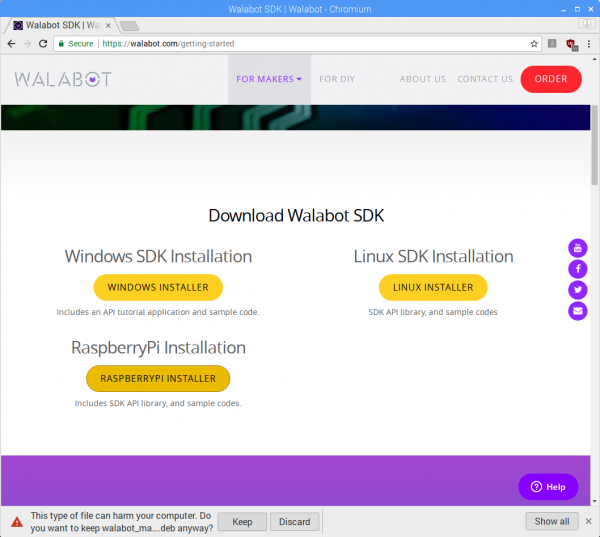
The process to install the Walabot API for Linux and Raspberry Pi are the same. The only divergence is the packet to download. Head over to Walabot'south site to download the package.
Scroll down the page and click on the bundle for your distribution. For the telescopic of this tutorial, we volition cull the package for Raspberry Pi.
One time downloaded, you may get the following warning:
Click on the "Keep" button to confirm the download.
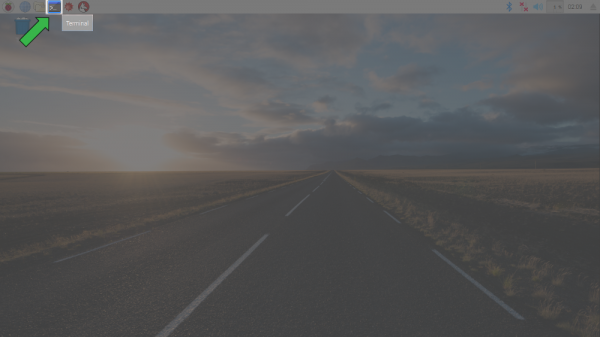
Open a control line as indicated by the light-green arrow and highlighted icon in the image below.
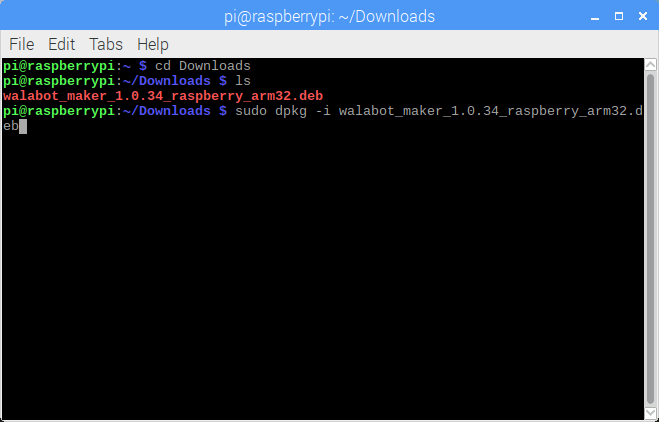
Head to the location where the package was downloaded. Most likely this was placed in the "Downloads" folder. Type this command and hit the "Enter fundamental."
cd Downloads To view the contents, experience costless to type this command:
ls In the command line, type this command based on the *.deb bundle that was downloaded:
sudo dpkg -i walabot_maker_1.0.34_raspberry_arm32.deb Once the command is ready and matches the downloaded package, hit the "Enter" fundamental.
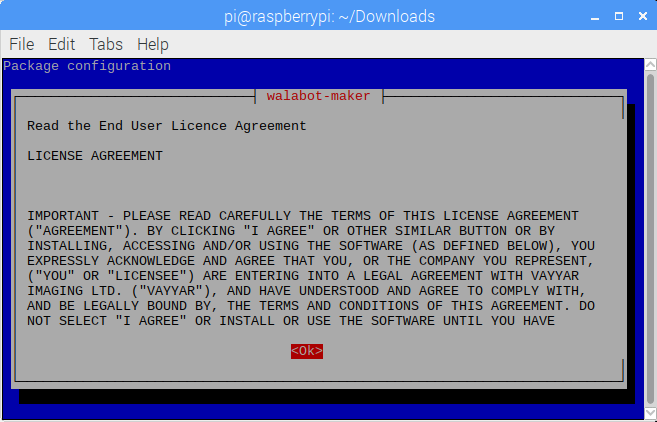
While installing, you may exist prompted with an End User License Agreement. Read through it, printing the "→" button on your keyboard, and hitting "Enter."
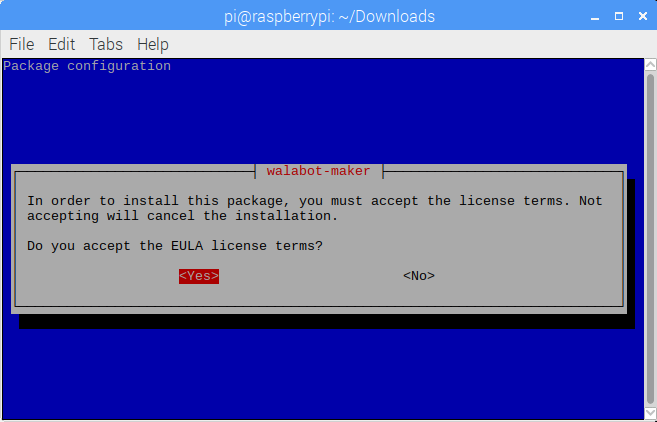
You will be prompted over again with some other question. Read through the brief bulletin, navigate to "<Aye>", and hit "Enter."
The following paths and files will be installed in these locations:
- /usr/lib/libWalabotAPI.so - The Walabot library.
- /usr/include/WalabotAPI.h - The Walabot library header file.
- /var/lib/walabot/... - The Walabot database and configuration files. Give this path to Walabot_SetSettingsFolder.
- /usr/share/doc/walabot/... - Example code, license, and README.
- /etc/udev/rules.d/... - Special udev rule for Walabot device, and then information technology could be accessed without root privileges.
For more information about the Walabot API Library, head over to Walabot's documentation.
Example API
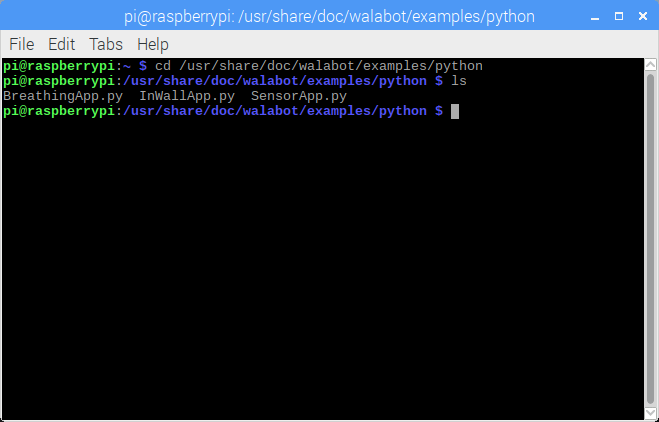
Let's try out the examples in Python! The examples enable the user to employ the sensor data for embedded projects. At that place a few methods of running the examples. Since we still have the command line open up, nosotros'll open the Python instance through the final. Navigate to the examples using this command:
cd /usr/share/doc/walabot/examples/python Typing this command will listing the iii examples in that path:
ls Connect the Walabot to the USB port to start testing the Walabot examples.
Target Detection due west/ SensorApp.py
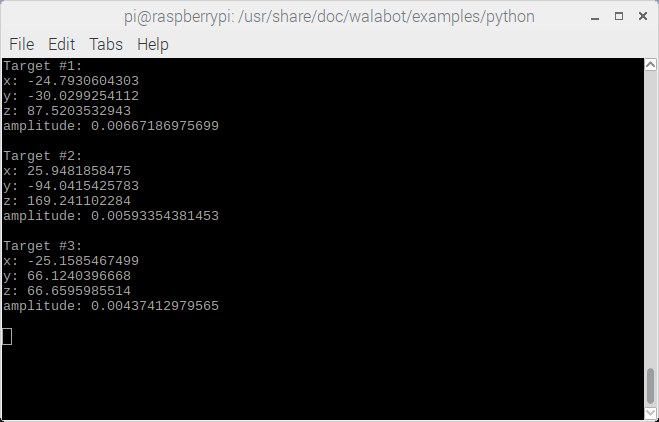
To run the SensorApp.py instance, type this control once yous are in the directory.
python SensorApp.py Again, make sure there are no moving objects in front end of the sensor when the program begins. The SensorApp.py is just similar the target detection example that was demonstrated in the SDK for Windows. The sensor data will exist output in the terminal every bit shown below.
Try moving your mitt in forepart of the sensor to get a feel for the sensor values. Blazon Ctrl+c in the command line to stop the program.
Breathing west/ BreathingApp.py
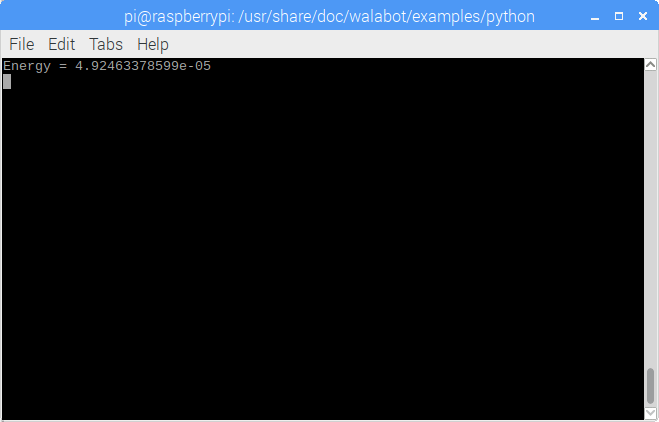
To run the BreathingApp.py example, type this command:
python BreathingApp.py This is just similar the animate example that was demonstrated in the SDK for Windows. With nothing in front of the Walabot, the output should exist a very small value.
Stand in front end of the Walablot and accept a deep breath in. As yous inhale, the value may wait like the output below. The value may exist different depending on how far you are from the Walalbot.
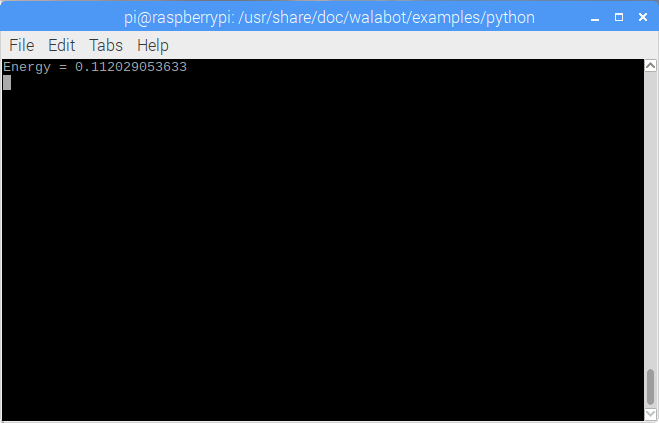
As you exhale, the value should decrease. The output may expect similar to the output below.
Type Ctrl+c in the control line to cease the program.
Detecting Objects Behind Materials westward/ InWallApp.py
To run the InWallApp.py instance, type this command:
python InWallApp.py Again, movement the Walabot slowly a round motion on a flat surface once the program begins. Here'southward what the output may await like when in that location are no objects backside a wall or table.
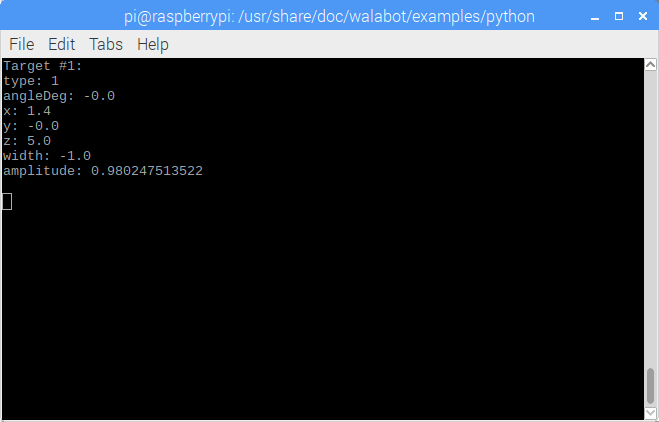
Here's what the output may look like when there is a metal pipe behind the surface.
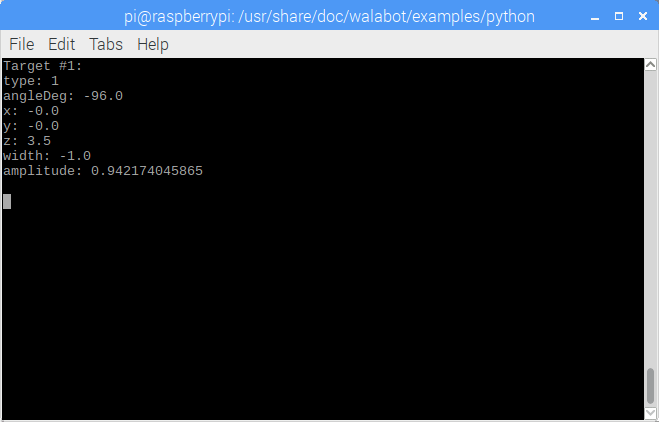
Rotating the Walabot, here'southward what the output may look like with the metallic pipe behind the surface.
Type Ctrl+c in the control line to stop the program.
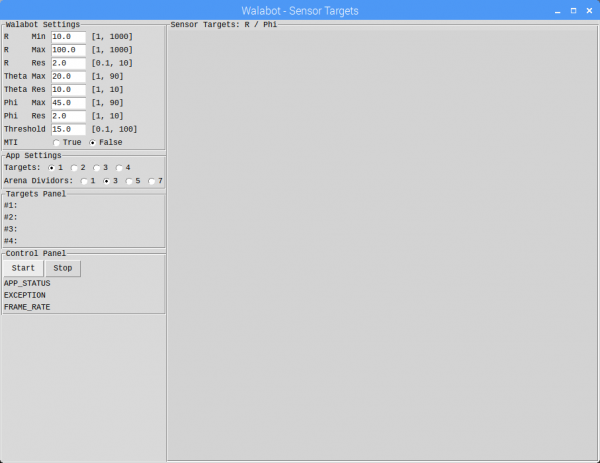
Displaying Targets w/ SensorTargets.py
Let's try one more instance from Walabot'south GitHub repository:
For simplicity, we will head to the Walabot-SensorTargets repository. The other examples may require you to arrange the lawmaking and hardware to run the the examples. Download the example by clicking on the Clone or download button. Click once again on Download ZIP. Caput to the directory where the files were downloaded by typing the post-obit command:
cd Downloads Unzip the .zip with this control:
unzip Walabot-SensorTargets-master.nil In the command line, blazon the following:
pip install WalabotAPI --no-index --observe-links="/usr/share/walabot/python/" Change the electric current directory where the instance was unzipped:
cd Walabot-SensorTargets-primary Run the example past typing:
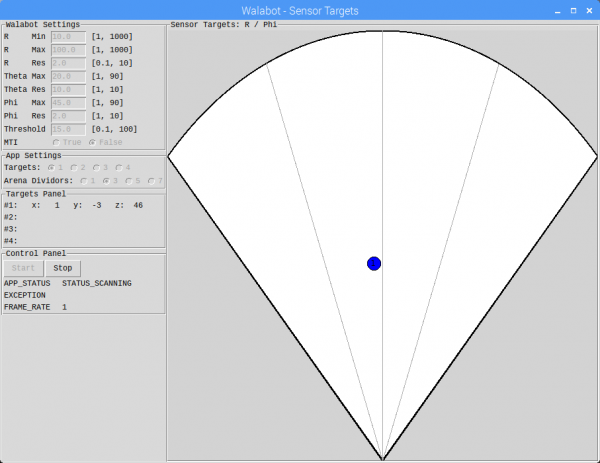
python SensorTargets.py The program will begin running and open a separate window. Click on the Start button to begin reading and ensure that in that location is nothing moving in front of the Walabot.
An object should display in the arena when in forepart of the Walabot. In this instance, I just placed my hand in front of the Walabot.
Now that nosotros take tested the SensorTargets.py, try the other examples listed in the GitHub repository! The SeeThroughDemo.py is a neat example that visually notifies you if there is an object backside a wall instead of just the output values in the InWallApp.py . The RawImage.py graphically displays the image of objects in view just like the SDK in Windows.
Troubleshooting
Here are a few troubleshooting tips when using the Walabot on a Raspberry Pi.
• Missing Walabot API
If you are having issues running the Python examples from GitHub, the Python packages for the Walabot API may not be installed. You lot may receive an error like to the output below.
language:emacs Traceback (most contempo call last): File "sensorTargets.py, line 3, in <module> import WalabotAPI ImportError:NoModule named WalabotAPI Try using the pip control as explained earlier.
• Suspended Program
If y'all typed Ctrl+z, the programme is suspended. Y'all may get an error similar to the output below.
language:emacs ^Z [1]+ Stopped python SensorApp.py pi@raspberrypi:/usr/share/doc/walabot/examples/python $ python SensorApp.py Traceback (most contempo telephone call concluding): File "SensorApp.py", line 74, in <module> SensorApp() File "SensorApp.py", line 38, in SensorApp wlbt.ConnectAny() File "/usr/share/walabot/python/WalabotAPI.py", line 186, in ConnectAny _RaiseIfErr(_wlbt.Walabot_ConnectAny()) File "/usr/share/walabot/python/WalabotAPI.py", line 122, in _RaiseIfErr raise WalabotError(message, res, extended) WalabotAPI.WalabotError: WALABOT_INSTRUMENT_NOT_FOUND pi@raspberrypi:/usr/share/doctor/walabot/examples/python $ Traceback (almost contempo call last): File "SensorApp.py", line 74, in <module> SensorApp() File "SensorApp.py", line 38, in SensorApp wlbt.ConnectAny() File "/usr/share/walabot/python/WalabotAPI.py", line 186, in ConnectAny _RaiseIfErr(_wlbt.Walabot_ConnectAny()) File "/usr/share/walabot/python/WalabotAPI.py", line 122, in _RaiseIfErr enhance WalabotError(message, res, extended) WalabotAPI.WalabotError: WALABOT_INSTRUMENT_NOT_FOUND You lot could try closing the control line and restarting the plan.
Resource and Going Further
Now that you've successfully got your Walabot up and running, it'due south time to incorporate it into your own project!
For more on the Walabot, check out the links beneath:
- Walalbot.com - Official website for the Walalbot.
- Technical Datasheet (PDF)
- SDK and API Package Downloads - Download the latest stable SDK and API packages here.
- API Library - Documentation for the Walabot API
- GitHub Project Repo - Walabot's projection repository.
- Community - Projects from the Walabot community listed on Hackster.io. Control LEDs based on your breathing patterns, detect falls, or add unique sensing to your robot/drone. Some tutorials are completed while others are still documenting. There are many uses but here are some practical applications that are linked beneath:
- Abode Monitoring And Alerts For The Blind
- People and Fall Detection with Walabot
- Walabot Slumber Quality Tracker
- WalaBreathe - A Wireless Jiff To Speech Assistive Device
- Walabot Security Robot with Alexa Control and Control
- Vehicle Rear Vision
- Inspection Drone with Walabot Capability
- Wireless Low-cal Switch Manipulator
- SFE Product Showcase
For information nigh stands and enclosures check out the 3D models used in these projects:
- Thingiverse
- Walabot Stand by daveyclk
- Walabot Enclosure by makerhill
For a listing of useful Raspberry Pi commands, head over to this page:
- Circuit Basic: 42 of the most Useful Raspberry Pi Commands
Need some inspiration for your next projection? Bank check out some of these related tutorials:
Artemis Global Tracker Hookup Guide
The SparkFun Artemis Global Tracker combines the Artemis processor with an Iridium 9603N satellite transceiver, ZOE-M8Q GNSS transceiver, and MS8607 PHT sensor. With a clear view of the sky, this board allows you to send and receive short data letters from anywhere in the world including remote locations far beyond the reach of WiFi and GSM networks. Follow this guide to get started with the Artemis Global Tracker.
Source: https://learn.sparkfun.com/tutorials/getting-started-with-walabot/all
0 Response to "How To Set Up Walabot"
Post a Comment